Software DSP Solutions for Weak Signal Communications
--by Roger Rehr, W3SZ This was written in 2002 and last updated circa 2004
This article was originally
written in HTML. Some of the links will not be available if you are reading
the printed version of it. If you are using the HTML version, the links
below will take you to the appropriate part of the page for each subject.
Figures are presented at the end
of the article; while in the text you can click on the reference to the figure
and then you will be taken to the figure. After looking at the figure you
can click on the 'Return to text' hyperlink at the end of the
caption for that figure to get back to the appropriate point in the text. Once that's been done, I find that with both Netscape Navigator and Microsoft Internet Explorer I can use
the Browser's 'Back' and 'Forward' buttons to flip back and forth between
the text and the accompanying figure in a very convenient manner.
I. DSP for Weak Signal Communications:
A Brief Overview
II. Available DSP Packages:
A Brief Summary of Some First Generation Packages
III. Linrad
: Leif Asbrink
SM5BSZs Linux PC Radio for Intel Platforms
IV.
DSP-10: Bob Larkin W7PUAs
144 MHz DSP IF Transceiver
V.
JT44: Joe Taylor K1JTs DSP
Solution
I.
DSP for Weak Signal Communications: A Brief Overview
DSP is an acronym for "Digital
Signal Processing". Anytime an analog signal is converted to digital form
and processed in some way, that is DSP.
The use of DSP techniques in amateur radio is exploding, both in
terms of its use in commercial transceivers and receivers, and in terms of
homebrew hardware and software construction projects available to and undertaken
by hams.The ARRL Handbook since at least its 2000 edition has had an excellent
basic introductory chapter on DSP. ARRL publications such as QST and especially
QEX have featured excellent articles on the subject during the past 2 years.
A wealth of information is available on the Internet.
A convenient starting point for exploration might be one of my web
pages, with URL start.htm
. This article will discuss some
of the DSP software that is available for enhancing the reception and decoding
of RF signals. In this article I
will discuss some of the software or software/hardware solutions that are
now in use by hams who need to pull those really weak signals out of the
mud, or to separate one weak signal from many other signals crowding around
it.
I began using DSP techniques
because of my interest in doing 144 MHz EME in a noisy RF environment. EMEis
truly "weak signal" communications. The "typical" round-trip path loss when
the moon is at perigee (closest to the earth) is approximately 251.5 dB at
144 MHz. If you consider a system where maximum legal power is present at
the antenna, the system starts with 31.76 dBW
transmit power. If the antenna array has 19 dB gain, then the signal leaving
the antenna will be 51 dBW. The signal arriving
back from the moon at the receiving antenna will be on the order of -200
dBW. If the receiving antenna also has 19 dB
gain, the signal arriving at the preamplifier on the mast will be -181
dBW. If the antenna has a noise temperature of 200 K, the preamplifier
has a noise figure of 0.5 dB, the subsequent 144 to 28 MHz
transverter a noise figure of 1 dB, and each has a gain of 20 dB then
the receive system will have a noise floor of -187 dBW
if a bandwidth of 250 Hz is used. (As long as the 28 MHz IF is reasonably
state of the art, its noise figure is irrelevant as it is divided by the
product of the gains of the preamplifier and the transverter
when figuring its equivalent noise temperature). Thus the receive system
will detect the signal as (-181+187) or 6 dB above the noise. Throw in a
couple of dB for cable loss, and you may be 2-4 dB above the noise. Compare
this with a typical 1 watt HT at 10 kM with
a 0 dB gain antenna, where the received signal would nevertheless be 60 dB
OVER the noise (or roughly a million times stronger)! An astronaut using
a 1 watt HT at 1000 kM from you, who would still
be 20 dB above the noise! Thus EME IS truly weak signal work! [To convert
dBW to dBm, just
add 30; i.e. the noise floor of -187 dBW becomes
-157 dBm]
The role of DSP techniques in EME and other weak signal work is of course to provide substantial improvement in signal reception and decoding (interpretation). There are two approaches to using DSP techniques to increase the success potential of 144 MHz EME efforts. The first and more obvious approach is to use DSP techniques to improve the human, aural detection of CW EME signals. There has been much work in this arena over many years. The second approach is to use DSP methods to provide for automated message detection and decoding of signals that may not even be audible with standard audio processing techniques. These methods have only very recently become widely available to amateur radio operators, and are exemplified by the modes PUA43 developed by Bob Larkin, W7PUA, and JT44, created by Joe Taylor, K1JT. Successfully using either approach for weak signal VHF/UHF/Microwave work requires considerable skill on the part of the operator. BOTH forms of communication have been accepted by the ARRL as meeting the requirements for their Awards Programs (Reference: Personal Communication to W3SZ, by email, Spring 2002). Thus which technique to use for weak signal communications is a matter of personal preference for each operator. Like other experienced EME operators, I have found that programs such as PUA43 and JT44, both examples of the computer decoding paradigm, could at times receive complete and accurate information when I could not hear the other station, and so at least under some circumstances, the human interface represents a weak link when compared with automated decoding by the computer.
When one is using DSP techniques
to improve the accuracy of human decoding of the message, there are several
features that we would like to have in our ideal DSP program.
Specifically, the ideal
program should provide:
1. A waterfall display with adjustments possible for color gain, baseline
level, visualized bandwidth, frequency bin size, and number of averages per
displayed line. A waterfall display is basically a way of displaying the
time course of signals that have been received by having one axis (usually
the horizontal) represent frequency, the second axis (usually vertical) represent
time, and then using color to display signal strength. A properly designed
waterfall used in the correct way will allow one to visually detect signals
that are considerably below the audible threshold.
This is possible by virtue of both signal averaging and by the use
of very narrow frequency bins, both of which increase signal-to-noise ratio.
Signal averaging increases the signal-to-noise ratio by the square
root of n, where n is the number of signals averaged.
This means that averaging two signals increases the signal-to-noise
ratio by the square root of 2, or 1.414.
Expressed in dB, this would be an improvement of 1.5 dB.
Narrowing the bin frequency range increases the signal-to-noise
ratio by n where n is the fractional bandwidth reduction.
For example, decreasing the bandwidth to of its previous width
doubles the signal-to-noise ratio, or increases it by 3 db, all other things
being equal.
An example of an excellent
waterfall display is shown in
figure 1
. This illustration is a screen grab
from Linrad which displays here a 16 kHz portion
of the 2 meter band as received by me during the ARRL 2001 EME Contest. You
can see among the many birdies I have at my location, at least 12 vertical
dashed lines; each one of these is an EME stations signal
2. A spectral display with the following parameters being adjustable: vertical
gain, baseline level, visualized frequency range, frequency bin size, and
number of averages per displayed spectrum. A spectrum is just the familiar
plot of signal intensity vs frequency for a single
point in time. A spectrum is shown just below the waterfall display in the
Linrad image of figure 1
.
3. DSP audio processing with
a. variable bandwidth filtering
with adjustable center frequency
b. adjustable LMS (Least
Mean Square) or other noise reduction algorithm
c. binaural receive capability
d.
defeatable and adjustable AGC (if AGC is used)
e. adjustable notch filtering
designed so that it is useful when in CW mode.
The bandwidth filters that
can be created with DSP have the advantages of (1) being immune to the problem
of aging-induced changes in component values producing altered filter parameters
with time, (2) being very flexible (i.e. easily altered by the user as requirements
change), and (3) the fact that they can be designed to much more stringent
specifications than is generally practical with analog components. They
very much lend themselves to experimentation, as trying a different configuration
often just involves just changing a parameter value in software and recompiling
the program rather than substituting hardware components. To my ear the
DSP filters I have used have had less ringing than analog hardware filters
of the same selectivity.
LMS (
Binaural receiving methods
delay the arrival of part or all of the signal going to one ear. This 'pseudo-stereo'
sometimes makes the desired signal seem to pop out of the background.
Linrad, DSP-Blaster, and the DSP-10 all have binaural receive capability
available. Each processes a single incoming signal so that the desired signal,
based on frequency and phase, seems to pop out of the background noise when
the binaural mode is activated. Linrad goes
further and actually permits the simultaneous reception of two separate receive
channels, thus allowing reception of two signals simultaneously (for example
vertical and horizontally polarized signals) and using computer/DSP techniques
to linearly combine the signals using an orthonormal
transformation, resulting in two new signals. One of these new signals
has a polarization that matches the incoming wave, while the other is orthogonal
and contains 'no signal at all'. The
Linrad software allows one to just listen to
the polarization-angle-matched component of the signal, resulting in an improvement
in signal-to-noise ratio. In fact,
with Linrad one can use this automatic polarization
matching and also have binaural reception of the remaining polarization-angle-matched
signal.
Digital notch filters can
be made much sharper and deeper than analog notches. The ideal notch would,
once assigned to an offending carrier, follow that carrier as it moved in
frequency so that the carrier would stay suppressed if it drifted, or if
the receiver was tuned or drifted. DSP-Blaster's Notch has such Automatic
Frequency Control (AFC). For weak signal CW use, the notch filter must be
able to be controlled so as not to eliminate the desired CW carrier. This
can be done after a fashion with DSP-Blaster's notch, but not with the notch
in DSP-10, so the DSP-10 notch is not useful in CW mode.
Linrad will remove many spurs, by pointing
and clicking on each of them with the mouse.
But as a matter of practicality with Linrad
, run with a 20 Hz filter (as I generally use it), there is only one signal
in the audio pass band and no need for a notch filter.
When the final link in
the receive chain is not human hearing and interpretation but computer analysis,
the list of desired software characteristics boils down to three items:
user friendliness, accuracy of the final result, and efficiency
(speed) of achieving the correct solution.
Back to top.
II.
Available DSP Packages:
A Brief Summary of Some First Generation Packages
Each of the DSP Solutions
I will discuss takes an analog signal at a relatively low (audio or near
audio) frequency, converts it to digital form using an Analog-to-Digital
converter (ADC), and processes it digitally.
The programs using the human ear and brain for final signal reception
and decoding then convert the digital signal back to analog form using a
Digital-to-Analog converter (DAC) and send it to speaker or headphones for
human reception and processing. The systems using automated signal decoding
may omit this final step. Programs
that are primarily used with human signal detection as the final common pathway
include an older MS-DOS-based program named DSP-Blaster; the Windows-based
programs Spectran, ChromaSound
, and GNASP1; and Linrad, which runs on Linux-based
systems. DSP-10 can be used for either
human or automated decoding and runs only in true DOS mode. An audio-only
version permits use of DSP functions with human audio detection and analysis
as the final stage. WSJT, which includes JT44 as one of two subprograms,
is a Windows-based program designed for automated signal interpretation.
In this article we will limit our discussion of WSJT to JT44.
An additional DOS-based program, FFTDSP, offers no audio processing
but will provide a waterfall display. It is not discussed further here.
DSP-Blaster works ONLY
with ISA bus Creative Labs SoundBlaster soundcards.
Linrad, Leif SM5BSZ's Linux PC-Based
Receiver, can use a variety of soundcards. I use an M-Audio Delta44 for
ADC and processing and a Soundblaster PCI64 for
DAC and output with Leif's program.
The Delta44 permits sampling rates of up to 96 kHz and thus with
quadrature (I/Q) detection will permit bandwidths (and thus waterfall
display widths) of up to nearly 96 kHz, a major advantage. The DSP-10 uses
an Analog Devices EZ-Kit Lite for A/D and D/A
conversions and processing. WSJT will
work with most Windows-compatible soundcards.
DSP-Blaster was written
by K6STI, Brian Beezley, who updated it to DSP-Blaster
2.56 in 2001. He is no longer providing
updates. This program has good LMS noise reduction, narrow filters with
adjustable bandwidth and center frequency, a beautiful notch filter, synthetic
stereo, and much more. It requires a 486 or better with a math coprocessor,
at least VGA video, a mouse, a 16 bit Creative Labs ISA sound card, and DOS
3.0 or later. It must run in DOS mode. You can run it from Windows 95 or
98, but not as a window; it must run in full screen mode.
The program has three frequency-domain display modes: waterfall,
single spectrum, and 3-D spectral history (stacked plots).
Figure 2
shows a typical DSP-Blaster screen.
There are two time domain modes: waveform and envelope.
It has several processing functions that are useful for CW operation:
a band pass filter, a peaking filter, LMS noise reduction, and a coherent
band pass filter. The coherent band pass filter produces binaural (stereo)
output. The latest version 2.56 was available for $75, or as an upgrade
from DSP-Blaster 2.0, $50 (Cash, U.S. check, or money order, E-mail delivery),
as of mid 2001 from:
Brian Beezley, K6STI
3532 Linda Vista Dr.
San Marcos, CA 92069
USA.
http://seti1.setileague.org/software/dspblast.htm
gives some additional info. Brian's email address as of mid 2001 wask6sti@n2.net.
I would recommend checking with him to see if the program is still available
before sending him funds. More comments
on DSP-Blaster are available at
http://www.nitehawk.com/rasmit/dsp_soft.html
. This is a very good program.
Its main limitation is that it works only with genuine ISA bus Creative Labs
Sound-Blaster Cards, and computers with ISA slots are becoming harder to find.
It can be quite finicky in terms of not wanting to run unless your computer
is set up 'just right'. But when it works, its does a very good job and
I find I can pull out the really weak EME signals with it very well, better
than with any other program save Linrad.
ChromaSound
(http://www.siliconpixels.com
),by N7CXI and VE3EC provides graphic filter control and spectrum display
over a bandwidth of 5000 Hz or so, along with DSP noise reduction but no
waterfall. I don't think it does as good a job as Linrad
, DSP-Blaster, DSP-10, or Spectran in terms of
signal processing, and mention it here just for completeness. I don't use
it at all as the other programs mentioned do a much better job for me.
GNASP1 provides selectable filtering and spectrum output but no waterfall,
noise reduction, or notching. See
http://members.tripod.com/~gniephaus/gnasp1/gnasp1.html
. I've not used this at all recently as the filters didn't seem to be anything
special and its lack of a noise reduction algorithm is a real negative here
at W3SZ.
Spectran (by I2PHD and IK2CZL) replaces their
older DOS-based program, Hamview.
Spectran provides a waterfall display, a spectral display, mouse-adjustable
filters, and an LMS type noise reduction algorithm. The filters and noise
reduction algorithm in Spectran do not work as
well for me as those in Linrad, DSP-Blaster and
the DSP-10. The waterfall display
is very good, but not as good as Linrads. Links
for Spectran are at
http://www.weaksignals.com/
. I don't use this because the filters as noted just aren't quite as good
as I need and Linrad, the DSP-10, and DSP-Blaster
work better for me.
The programs just discussed
in some detail represent the simpler, first generation DSP programs that
exist. The only one of these that
I still use, and that just occasionally, is DSP-Blaster.
Now we will move on to more sophisticated, current generation programs
such as Linrad, DSP-Blaster, and JT44.
For a superb web page that
has a link to an excellent DSP Resource page go to
http://www.nitehawk.com/rasmit/
and click on the "DSP for Weak Signal" link at the top of the page. Or,
go directly to http://www.nitehawk.com/rasmit/dsp50.html
to get to DSP directly. If you do the latter you'll miss a nice introductory
page though. Back to
top.
III.
Linrad
: Leif Asbrink
SM5BSZs Linux PC Radio for Intel Platforms
Leif
Asbrink, SM5BSZ, has developed a superb weak signal receiver in software,
which is named Linrad, short for Linux Radio.
This receiver is the ultimate DSP tool for optimizing the receive
chain where the human is the final link.
Here is what he has to say about Linrad
, by way of introduction.
Modern computers
have the processing power to outperform conventional radios in receiving signals
with poor S/N. Particularly when the poor S/N is due to interferences rather
than to white (galactic) noise the computer can remove interference within
the narrow bandwidth of the desired signal by use of the information about
the interference source retrieved by use of larger bandwidths. The signal
processing can be far more clever than what has been possible before. Each
interference source can be treated as a signal and the DSP radio can receive
AND SEPARATE a large number of signals simultaneously. The DSP radio package
is under development with flexibility and generality as important aspects.
The DSP-radio for LINUX is designed for all narrow band modulation methods
for all frequency bands. To start with the following modes will be included:
Weak signal CW (primarily EME), Normal CW, High speed CW (meteor scatter),
SSB, FM. He goes on to say,
The system is designed for flexibility so it can be used for many different
combinations of computers, A/D boards and analog radio circuitry. The platform
is Linux and the package will typically operate with a 486 computer together
with a conventional SSB receiver as the minimum configuration. The current
high end operation is with a 4-channel 96 kHz A/D board and a Pentium III
providing nearly 2 x 90 kHz of useful signal bandwidth in a direct conversion
configuration (stereo for two antennas). When the Linux package is in full
operation I will interface it to a modern radio A/D chip and digital data
decimation chip. The component cost is very low and there will be an exciting
improvement in dynamic range, bandwidth and flexibility.
The LINUX PC-radio for Intel platformswill be continuously upgraded
to show various aspects of digital radio processing and how they are implemented
in the DSP package. The Linux PC-radio is not designed for VHF weak signal
only. It is very flexible and designed to accommodate routines for all radio
communication modes on all frequency bands.
The program can run on a 486 to process 3 kHz bandwidth with almost
any sound board. It can also run on a Pentium III with a 96 kHz board such
as Digital River Delta44 [this is what I use; now called the M-Audio Delta44
-W3SZ] to produce spectra covering about 90 kHz bandwidth, using two mixers
to provide a direct conversion receiver. (For EME it may be easiest to make
a direct conversion receiver for a fixed frequency such as 10.7 MHz and put
some converter in front of it). This
is an ongoing project. The package
will provide more than 30 kHz bandwidth with a standard audio board and should
be very useful for 10 GHz EME and any other mode where a wide spectrum range
has to be searched.
Leif started
this project years ago with an MS-DOS PC radio (link
http://www.antennspecialisten.com/~sm5bsz/pcdsp/pcdroot.htm
) and has expanded the projectand moved it to Linux for reasons of hardware
portability (link
http://www.nitehawk.com/sm5bsz/linuxdsp/linroot.htm
). Details on how to install and get
started using Linrad can be found on Leifs website
at
http://www.nitehawk.com/sm5bsz/linuxdsp/linrad.htm
.
This is the current state
of the art for weak signal work. The software receiver needs a
baseband input of 0-xx kHz to achieve a waterfall/spectral bandwidth
of xx kHz. Given this input, and
using quadrature detection, a sampling rate of
yy kHz will provide a waterfall/spectral bandwidth
of up to approximately yy kHz (with
yy less than or equal to xx, of course).
If standard (non-quadrature) mixers
are used, the maximal waterfall/spectral bandwidth will be approximately
yy/2. With an M-Audio Delta44 soundcard
for the input, operating at 96 kHz sampling rate, and with
quadrature detection, the useable waterfall bandwidth available is
about 90 kHz. There are several options available for use as a front-end
to Linrad.
First of all, its a simple matter to homebrew a very good front-end, as
Linrad does all of the hard work.
Here I use a circuit with a couple of TUF-1 mixers from
Minicircuits, a 10.7 MHz 1st IF and filter, with a transistor
amp for the first IF amp and a low-noise OP amp (AD797) for the 2nd
IF amp. This circuit is not
quadrature, so I get just about 45 kHz of useful bandwidth when using
it with the Delta 44. I use a computer-controlled
1st LO, so that I have wideband frequency coverage with the receiver;
essentially from about 0 to 500 MHz (with appropriate filters at the input
for each range, to prevent spurious responses).
Figure 3
shows a diagram of the circuit for my homebrew receiver front-end.
I have two of these units operating simultaneously, one for the horizontally polarized antenna array elements and one for the vertically polarized elements. Linrad uses both of these to provide reception that is always at the correct receive polarization angle; if the incoming wave is at 37 degrees, that is how Linrad receives it. No more lock-out or signal degradation due to crossed-polarization. And Linrad does this automatically!
The second option is to use a kit that was introduced
by Expanded Spectrum Systems at
The third option for a
front-end is a little bit in the future; perhaps near the end of this year,
perhaps early next year. Leif has
designed a superb front-end for Linrad, consisting
of several parts. It basically consists
of separate units which provide conversion from 144 MHz to 70 MHz, from 70
MHz to 10.7 MHz, from 10.7 MHz to 2.5 MHz, and from 2.5 MHz to
baseband. You can see his design for the latter two of these converters,
complete with the circuit board masks on his website at
http://www.nitehawk.com/sm5bsz/linuxdsp/optrx.htm
. I believe that these lower frequency
converters will be sold by
Svenska
Antennspecialisten AB, whose website
is at http://www.antennspecialisten.se/
. There is no information on their
website yet about these units. A block
diagram of the functionality of Leifs SOFTWARE is helpful in understanding
how it works.
Figure 4
is a copy of Leifs block diagram, taken from his website.
The receiver input is at the top left of the diagram. Two input signal paths are shown, one for the horizontally polarized antenna elements and one for the vertically polarized elements. The FFTs are of course fast Fourier transforms, that take the signal from time domain to frequency domain, and the timfs are reverse transforms that take the signal from frequency domain back to time domain. The blue signal paths are in the time domain and the red signal paths are in the frequency domain. The green lines represent power vs. frequency displays and the black lines represent control signals. The diagram nicely explains the signal flow and processing. The first FFT is used to generate the wideband spectrum display. AGC functions are then performed and then the signals are subjected to reverse Fourier transformation that puts them back in the time domain. The noise blanker is then applied. The noise blanker is a novel, two stage circuit if the Linrad receiver has been calibrated for frequency and phase response using a pulser unit. (This procedure is not difficult, and is described in detail on Leifs website). The first stage blanker is called the clever blanker. It models the noise and fits to each pulse a standard pulse with amplitude, phase, fractional position, and polarization all calculated to match the actual noise pulse as closely as possible. The standard pulses are then subtracted from the signal waveform, reducing the noise pulses by approximately 30 dB. The dumb second stage blanker then removes all data points for which the total power is above a given threshold. This reduces the noise by approximately 40 dB. The results achieved by this two-stage noise blanker are phenomenal! If the receiver has not been calibrated, then just the dumb noise blanker is available, but even this does a very good job. After noise blanking is done, the second FFT is performed. This produces the waterfall display, and after the polarization control algorithm is applied, the high resolution display is generated. A second reverse FFT is performed. There is then the possibility for more noise blanking. A third FFT provides the baseband display and then another reverse FFT returns the signal to the time domain for final signal processing and audio is sent from the soundcard to either audio amplifier, speakers, or headphones. All of this is explained in very detailed fashion on Leifs website. In addition, Linrads source code is there.
I have found that Linrad does an absolutely superb job of allowing me to hear the desired weak signal hidden in the midst of the all the noise and clutter present at my QTH. It does this better than any other receiving system I have ever tried. I generally use it with the filter set at 20-25 Hz. The best way to describe Linrads operation and features is to discuss a series of screen grabs I made while using it as my primary receiver during the EME contests last year. I'll start with Figure 5 , a screen grab taken with the receiver operating on 144 MHz, during an EME contact with KB8RQ. This is a newer version of Linrad than I used in the screen shot shown in Figure 1 as an example of a waterfall display, and Ive arranged the screen differently. Leifs software lets you rearrange the screen almost anyway you want to.
Across the top of Figure 5 you see the frequency scale in Hz. At the time of the contest, I had Linrad set up to cover 22 kHz, which is a reasonable spread for 2 meter EME. With it set up like this, one can see everything that is going on in a 22 kHz slice of the band. Depending upon your soundcard, as discussed above, you can view up to a nearly 96 kHz-wide slice of the band at one time.
The small arrows near the left and right corners at the top of the screen allow adjustment of the frequency width and the center frequency of the waterfall and main spectrum displays (which track together in this regard),.
Below the frequency scale at the top of the screen is the waterfall display, showing signal intensity as a function of frequency horizontally, and as a function of time, vertically. Earlier times are nearer the bottom, most recent times at the top. Decimal minutes are displayed along the left vertical axis. The wide white horizontal bands extending from 23000 to 31000 Hz are my signal when I am transmitting. Of course, when I am transmitting, my transmitter overloads the receiver as you can see occurring periodically, resulting in dark horizontal bands across the waterfall display. You can also see a dashed vertical line at 27000 Hz; that is KB8RQs signal on the waterfall. Lower on the frequency scale, at 21800 Hz or so is the dashed vertical line that represents W5UNs signal. Between the times 53.36 and 56.15 you can see a signal that starts at 27500 and then moves across the screen to lock in on KB8RQs frequency at 27000. That is me spotting the frequency to bring my transmitter onto KB8RQs frequency.
Just below the waterfall on the screen is the real-time main spectrum display. Signal strength is the vertical axis and frequency is the horizontal axis, corresponding to the same locations on the waterfall and the frequency calibration at the top of the graph. The little up/down arrows at the bottom left and middle right of this display allow you to adjust the range and center point (baseline), respectively, of the spectrum amplitudes displayed, so that the signals are the right vertical size for best viewing, and centered as you wish on the display. It is much more difficult to pick out weak signals on this display than on the waterfall, and I dont use the spectral display very much. Leif notes that the main purpose of the main spectral display is to aid in noise blanker level adjustments and to show very strong signals that saturate the waterfall display.
Below this on the left are the boxes to set (by clicking on the box and then typing in the desired values): the number of FFT1 averages per displayed point of the spectrum, the number of FFT1 averages per line of the waterfall, the zero point of the waterfall display, the gain of the waterfall display, the number of averages per displayed point of the high resolution spectrum (this is the display with red horizontal lines) and the number of averages per displayed point of the baseband spectrum (the noise blanker / filter window; this is the display with green horizontal lines).
To the right of these parameter boxes is the adaptive polarization control. The software receiver can be set up to receive two channels of data. In my case, one is the signal from the vertical elements of my M2 array, and the other is the signal from the horizontal elements. By rotating the line with the mouse you can select any desired receive polarization angle. Or, you can leave this set to automatic or 'adaptive' mode and then the software constantly optimizes the polarization angle. Moving the line on the horizontal bar (green when you can see the colors) changes the polarization from linear to elliptical to circular. I usually leave the polarization control set to adapt and let the computer do the work.
To the right of that little box is the high resolution display. To the right of that, on top, is the baseband (DSP filter) display, which will be discussed shortly. Below that immediately to the right of the high resolution display is the small coherence graph and signal amplitude box, and to the right of this below the baseband display is the automatic frequency control box.
Here is the important and, really, incredible part. By clicking with the mouse cursor at any point on the waterfall (or the main spectrum) you cause that portion of the spectrum to be placed in the high resolution spectrum box and DSP-processed. That is, that portion of the spectrum is DSP-filtered, noise-blanked, and converted to audio frequency so that it appears in your headphones or on your speakers. IT IS POINT AND CLICK RECEIVING!!! Because of the excellent DSP, this is an incredible experience. If you are not clicked on a signal, the receiver is silent. When you click on a peak, the signal pops into your headphones. To fine tune, you click on the peak in the high resolution spectrum, if need be, to touch up the tuning. You can see that KB8RQs signal is nicely centered in a 20 Hz bandwidth filter by looking at the baseband window. The two tiny A s (yellow and blue when you can see the colors) at the bottom left of the high resolution window are for setting the 'dumb' and 'smart' digital noise blanker levels. You have your choice of none, automatic, or manual for setting these blanker settings. The tiny o at the right bottom of this display turns on the oscilloscope function that shows the real and imaginary time domain spectra for the various channels of data so you can really tell what the blankers are doing.
The line and hump (yellow when you can see the colors) in the baseband display (which sits just to the right of the high resolution display) show the filter center frequency, bandwidth, and shape factor in graphical form. If you want a different filter bandwidth or shape factor, you just take the mouse over to the baseband display, and drag the filter curve wider or narrower, and the filter adjusts graphically. THIS REALLY WORKS!! There are several controls in the baseband window. As we just noted, by dragging the yellow lines with the mouse you can set the filter width and shape factor. There is a red horizontal bar at the left of the window that does not really show up with grayscale reproduction. This is the level or volume control. There is a red vertical bar at the right of the window that is the BFO control. You can vary the pitch of the received signal without taking it out of the filter pass band or moving it in the display. This is very nice. There are other controls at the bottom of the baseband display for setting coherent processing parameters, adjusting binaural receive parameters, and altering how the program handles the two signals in a dual polarity receive system.
How fast a machine do you need to run Linrad ? It depends on the parameters. With my setup, Linrad says that my machine, a 1.4 GHz Pentium 4 is idling 92.4% of the time while it is running. In other words, only 7.6% of its processing power is being used by the program. Leif has a very nice page that discusses timing / computation intensity issues and gives some examples for various hardware combinations. It is on his website at http://www.nitehawk.com/sm5bsz/linuxdsp/fft1time/fft1time.htm .
If you don't have a receiver with a wide (20-90 kHz) IF bandwidth you can still experience the wonder of Leif's receiver. On his website he has lots of EME contest files that you can download. Once you have his receiver running on your computer you can put the names of these files in a text ' adfile' that you create in the Linrad directory. This file will direct Linrad to these data files and when you start Linrad you can type 'h' and the program will run just as if you were actually receiving this data via your own antennas. You can click on the various signals, and even play with the receive polarization control. It is truly amazing to do this! Leif's main Linrad radio page has links to his many useful pages of explanation, diagrams, screenshots, etc. His website is a real treasure trove.
Figure 6 is a screen grab of a spectrum with Dave, W5UN's signal as received at W3SZ via the EME route. Ill use it to explain a bit more about Linrads operation:
On the waterfall display you can see Dave's signal appearing as a dotted line (because he is alternately transmitting CQ and listening) just to the right of an external signal near 27000 Hz. The very large white bands near the right side of the waterfall are my transmitted signal, which of course overloads the receiver, as you saw on the previous screen dump as well. On the waterfall display the external 'birdie' is just a hair's width below Dave's signal. Below the waterfall display, in the main spectrum display, you can see a green vertical cursor on Dave's signal. This serves to select it for processing for the high resolution spectrum display, DSP-filtering, noise blanking, and output for audio copy by the operator. The 'birdie' and Dave's signal run together on this lower resolution display. On the high resolution display, which is the tall, relatively large spectral display below the main spectrum display, there is excellent resolution of the signals; Dave's signal occupies the center of this display around 21672 Hz, and the mouse cursor '+' sits nearly exactly over the middle of Dave's signal. The green spectral peak is the in phase component of the received signal. The fact that there is no purple or out of phase peak indicates that the receiver has locked on to the polarity of W5UN nicely. The little blue receive polarization display to the left of the high resolution spectrum window shows that the received polarization angle is 83 degrees, and that Linrad is in the adaptive polarization mode, where it follows the polarization angle of the received signal automatically. The baseband display is below the main spectrum display to the right of the high resolution spectrum display. This windowshows that the filter, shown in yellow and set to about 20 Hz bandwidth, is well centered on Dave's signal. You can see both the center of Daves signal and the keying sidebands within the yellow outline of the filter band pass curve. The vertical magenta bar at the very left of this window is the level or volume control, and is adjusted by dragging the top of it with the mouse. Above it is a very bright red dot (actually a short, horizontal line) that indicates the received signal level. It is pinned at the top of the scale, commensurate with Daves usual signal strength. In this same window, the vertical red bar on the extreme right of the display shows the BFO frequency. The BFO frequency is off scale with the settings used in this display. Note: all of the 'birdies' (and there are many) are external signals here, that I receive with each of my receivers. They are present only with the antenna connected, and come and go with time and with variation of the antenna heading and polarization angle. They are not a problem produced by Linrad or the homebrew receiver, although this combination does an excellent job of showing them due to its sensitivity! At the very bottom of the display to the right of the high resolution display, and below the filter window, are the coherence graph / signal amplitude window on the left, and the AFC window on the right. The coherence graph shows that Daves signal has good phase coherence for automatic CW copying, and his signal amplitude as received here is 34.6 to 35.8 dB. This is relative amplitude, as I have not calibrated my system for absolute received signal strength. Both this window and the AFC box are discussed fully on Leifs website.
Finally, Figure 7 shows a Linrad screen of the W3CCX beacon on 13 centimeters, using the homebrew 144 MHz receiver and Linrad as the IF radio. I've changed the positions and sizes of the high- resolution, baseband, receive polarization, and AFC windows. This is just a matter of dragging the edges of the windows to change their positions. Note the frequency resolution on the waterfall and main spectral displays is now enhanced compared with the prior examples. The entire spectrum covers only 3 kHz. The frequency instability of the beacon signal can be easily seen. The receiver frequency is controlled by a Rb oscillator, and the variation seen represents the frequency instability of the beacon plus any Doppler shifting of the signal while en route to W3SZ. The high resolution window shows only a green spectral peak (which goes off scale at the top of this window) because there is only horizontally polarized input on this band at W3SZ. There is thus no signal in the orthogonal magenta-colored channel. The baseband display (which is below the high resolution display window) could be improved by contracting the vertical scale to cover just 0-30 dB rather than setting it to 0-60 dB as was done here. Again, this is just a point-and-click adjustment. This makes for an awesome receiver on the microwave bands. You can see (depending upon the filters you use in the receiver) up to 40 kHz or so of spectrum at a time if you are using a setup like mine, to spot those way off frequency microwave signals!! If you use quadrature detection, you can expand the spectrum viewed at one time to a bit more than 90 kHz! In this case I went to the other extreme, to look at the frequency stability of the W3CCX beacon over a relatively long and obstructed path, during a period of suboptimal receive conditions. Back to top.
IV. DSP-10: Bob Larkin W7PUAs Innovative 144 MHz DSP Transceiver
The superb DSP-10 hardware/software
by Bob Larkin, W7PUA, really goes a step beyond the other solutions discussed
here. It is more than a signal processor, when used as a hardware/software
solution with Bob's hardware design. Then it is a weak signal PC-based 'software
transceiver' for 144 MHz. It provides not only signal processing, and the
traditional CW, SSB, and FM modes, but also entirely new digital modes of
communication using long-term integration and FSK techniques. The DSP-10
is different from DSP-Blaster and some of the other products reviewed here
in that it uses an Analog Devices EZ-Kit Lite
to do the DSP processing rather than a sound card; it connects to a PC via
a serial port and just makes use of the PC for control and display; the EZ-Kit
Lite does all of the computational chores. It
runs under true DOS mode only (NOT a DOS Window). Bob's website is at
http://www.proaxis.com/~boblark/dsp10.htm
.
The DSP-10 software can
also be used without the RF hardware, as an audio DSP processor, using just
the Analog Devices EZ-Kit Lite evaluation board
(see below). Or, it can be used with an external homebrew front-end as the
final IF of a homebrew receiver. I
have done this at W3SZ with just a couple of TUF-1s and computer-controlled
oscillators to make a very nice receiver that covers from below the AM Broadcast
band to the 432 MHz band. Whether
used with or without the DSP-10 RF hardware, it has an excellent waterfall
display with adjustable gain, adjustable baseline, and adjustable signal
averaging (see
Figure 8
). The visualized bandwidth can be set to 1200, 2400 or 4800 Hz. It has
an excellent spectral display also with adjustable gain and baseline, and
1200, 2400 or 4800 Hz visualized bandwidth, as well as adjustable signal
averaging. It also has DSP audio processing with 200, 300, and 450 Hz bandwidth
filters at center frequency of 600 Hz, a 600 Hz bandwidth filter at center
frequency 700 Hz, and a 300 Hz bandwidth filter at a center frequency of
800 Hz. In addition there is a sin(f)/f matched filter for 12 wpm, and
a design-your-own filter too. It has adjustable LMS noise reduction, binaural
receive capability, defeatable and adjustable
AGC, and a notch filter. Unfortunately the notch filter is not manually adjustable,
so it will very effectively eliminate the desired CW signals.
The software is free and
can be downloaded from Bob Larkin's web site listed above. Bobs web site
has a parts list that makes ordering the parts for the project a simple matter.
Also, TAPR (http://www.tapr.org/
) has periodically made kits available with all parts except for the EZ-Kit
Lite.
Check their website for details on the next kit run.
Unfortunately, the EZ-Kit Lite, originally
Analog Devices Part ADDS-21XX-EZLITE, is now part number ADDS-2181-EZLITE,
and the price has risen several fold.
I purchased mine from Newark Electronics in 1999 and then again in early
2001, when the price was $94.70. As
of 8/30/2002 the Newark price is $346.95 plus shipping.
Setting up the audio version
of the DSP-10, without the RF hardware, is a piece of cake.
You just plug the audio output of your rig into the input of the
EZLITE, plug your headphones into the output of the EZLITE, connect a serial
cable from your computer to the EZLITE, and fire up the software.
Its just as easy if you are using your own external RF front-end.
Building the complete DSP-10 computer-controlled 144 MHz transceiver as
described in the September, October, and November1999 issues of QST takes
some time but it is not difficult, although it does make use of surface mount
technology. I built a DSP-10 in early 2000 and have found it to be superb
as a microwave IF. The ability to spot those weak signals that are up to
4 kHz off frequency at 2304 MHz and above is critical in the microwave contests,
and this radio really does that superbly. I have also used the RF Hardware
Version of the DSP-10 as a 144 MHz weak signal receiver and used it on 144
MHz EME. For this use its somewhat limited dynamic range is a shortcoming.
It is at least in my experience, at an admittedly very noisy location,
often overloaded during contests when there are strong local signals, and
this has been at times a significant problem when trying to use it for weak
signal work in such an environment.
The ARRL lab rated its IP3 at -21 dBm.
The limitation in dynamic range is I think probably a reflection
of the limited dynamic range of the EZLITE; the EZLITE is based on the ADSP-2100
Series which includes 16 bit fixed point processors, and the Codec used in
the EZLITE is the AD1847 which has probably just12-13 bits of usable dynamic
range although it is a 16 bit device.
The MAR-6 used as the first RF amplifier has an IP3 of +14
dBm and although it is followed by another MAR-6 before the first
TUF-1 Mixer and the crystal filter, I dont think these components should
be limiting in this regard.
Before describing the very
original and unique automated detection and decoding features of the DSP-10
Id like to share my experiences with it during the ARRL EME Contest 2000
when I used with a human (me) as the final step of the detection/decoding
chain. The first night of the first
leg of the contest I got my wish for making this a useful acid-test: a
noisy night with a lot of local activity, ideal conditions for comparing
the RF version of the DSP-10 with my usual EME station. This combination
of a high noise level and high-powered local activity made some things very
clear. The experimental system here
for the contest included a 2 x 2 stack of M2 2MXP20's with separate receive
lines for Horizontal and Vertical Polarity. There were dual ARR 144 MHz
preamps on the tower, close to the power dividers (my cavity preamps were
temporarily on the ground). The feed lines (LMR600UF to the bottom of the
tower, and then 7/8 inch hardliner to the operating position) were connected
to an EME grade relay in the shack so I could switch polarity with a flick
of a switch, or monitor both H and V simultaneously on two different receivers.
For the comparison I hooked a two way power divider after the relay to split
the receive signal into two paths, one path going to the SSB Electronics
LT2S Mk II / Elecraft K2 combination, and one
going to the RF version of the DSP-10. As I have slightly more than 20 dB
of preamp gain on the tower, and significantly less
feedline loss than this, this signal splitting didn't produce any
noticeable degradation in terms of minimal detectable signal.
At the same time, the baseline signal level in the shack was low
enough that I didnt need additional attenuation in the line to prevent unnecessary
degradation of system dynamic range due to excessive preamplifier gain.
What I found was significantly
different in some respects than what I had previously found for the Italian
EME contest, as that was a rather quiet night.
First of all, there are some 1.5 kW stations within a few miles
of me, and the DSP-10 RF version folded up and died when these stations were
transmitting at times when I was more of less in their line of sight to the
moon and when the moon was low in the sky.
In contrast, the K2/Transverter was really only bothered when these
stations were very close in, frequency-wise, and then I could still work through
their noise. Having the noise blanker on the K2 activated did increase the
problems with local QRM, as is the case with any noise blanker I've ever
tried, but I could still work with the NB on. In contrast, I just had to
shut the DSP-10 down when the locals were transmitting.
I should note that the only other operating conditions in which
Ive also experienced overload of the DSP-10 were when using it as the IF
for 10 G experiments at very close range (30-50 meters), but that otherwise
the DSP-10 has not had overload problems when used as an IF for microwave
work here. Nor has it had such problems
when used on 144 MHz with cavity preamps when the noise level is not excessive
and high-powered locals are off the air.
I should also note that when I use my FT-1000 MP in place of the
Elecraft K2 I the receiver chain I experience similar dynamic range
problems when both high-noise and high-signal-level conditions are present.
And the FT-1000 MP is generally considered to be a fine receiver,
if not in the same class as the K2, the Ten-Tec OMNI VI+, and the modified
Drake R-4 (see September/October 2002 QEX for an excellent reference on receiver
performance comparisons, by SP7HT).
Second, under these noisy
conditions, the LMS noise reduction on the DSP-10 didn't take out the noise
sufficiently. This is not surprising, as when the pulse noise is very bad
here, NO LMS algorithm I've ever used is sufficient. It takes an excellent
noise blanker such as the one in the K2 plus LMS (or just
Linrad) to do the job (the FT1000 MP noise blanker is not up to the
task, either)! During the periods where the pulse noise was absent, and
the kilowatt-plus locals werent transmitting, the DSP-10 was a joy to use.
As I noted before, it is very comfortable to listen to and with the binaural
implementation Bob Larkin has placed on it, it really pulls the signals out
of the mud when the binaural mode is activated. During the quiet periods
I preferred it to the K2/Transverter, but again it couldn't be used when
the pulse noise or local QRM was present at substantial levels.
Third, I have a lot of
birdies here at W3SZ. Frequently they were close in to the station I was
trying to copy. Here the use of the K2/Transverter fed into the computer
running DSP-Blaster was again superior, as I could either make the filter
very narrow, or turn on the adaptive notch DSP-Blaster provides (its VERY
sharp and narrow), or both, and eliminate the offending carrier. The filters
in the DSP-10 werent quite as good, and its notch cant be used on CW, as
it automatically removes the desired signal.
Fourth, on the VERY weak
stations, it was helpful to be able to play with the filter parameters on
DSP-Blaster, and I found that for the really weak stations I could only copy
them with the K2/ Transverter/DSP-Blaster combination.
The DSP-Blaster is more flexible in its filter selections than is the DSP-10,
which was described more fully in this regard above.
With the DSP-Blaster, the filter width is adjustable from 50 to
300 Hz in 25 Hz steps for the Coherent Bandpass
Filter, and the center frequency is adjustable from 10 to 990 Hz in 10 Hz
steps. For the standard bandpass filter the
filter width is adjustable from 50-975 Hz, again in 25 Hz increments. In
practice the lower limit of the center frequency for the DSP-Blaster filter
chain is determined by the low-frequency roll-off of the filters in the receiver
itself.
In terms of the waterfall
displays, I ended up liking the spectrum display of the DSP-10 much more
than that of DSP-Blaster.
To summarize the use of
the DSP-10 for weak signal use with human psychoacoustic detection and decoding,
it does a very good job for weak signal work except under conditions of high
noise and strong signal interference.
It should be excellent most anywhere for use as a microwave IF rig, and is
very good on 144 MHz as a primary weak signal transceiver unless the environment
is one of very high noise level or very strong local signals, or both.
Unfortunately, this is my current environment much of the time.
What REALLY sets the DSP-10
hardware/software combination apart from the competition is the very innovative
new modes that Bob Larkin designed into the software.
These modes can be accomplished only when the unit is used to communicate
with other DSP-10 units, and they place stringent requirements on frequency
accuracy and stability, and correct timing.
Frequency accuracy and stability must be on the order of 0.5-1 Hz
AT THE OPERATING FREQUENCY (which may not be 144 MHz if the DSP-10 is used
as an IF rig) when 2.3 Hz bin size is selected.
Timing of the two stations must be within 50-100 milliseconds (30
milliseconds is preferred). These
requirements pretty much mandate the use of GPS-controlled oscillators for
frequency control, and GPS or other NIST-Standardized timekeeping at both
ends of the attempted contact.
I have been successful
using, for frequency control, either a Rb-controlled
oscillator (Efratom FRS) or a GPS-disciplined
oscillator (either Brooks Sheras homebrew unit
or a surplus HP Z3801A). See K8CUs
website for an excellent first look at the Z3801A, with many very helpful
details (
http://www.realhamradio.com/GPS_Frequency_Standard.htm
). These units are available from
Buy Legacy for $249.00 as of 8/30/2002.
The units are listed on their website with many details at
http://www.buylegacy.com/app/site/site.nl?site=ACCT9270&mode=items&category=55&it=A&id=1181
. See Brooks website at
http://www.rt66.com/%7Eshera/index_fs.htm
for details on his fine unit. Ive
had good results with either GPS or internet-controlled timekeeping.
If, like me, you dont have network access on the DOS machine you
use for DSP-10, getting the timing accuracy from the GPS or internet-controlled
clock into the DSP-10 machine at the 30 millisecond level can be a bit tedious!
The automated weak signal
modes available with the DSP-10 are named EME-2, PUA43, LHL-7, and LTI.
EME-2 is a mode for determining
system performance and path conditions.
A typical screen for this mode is shown in
figure 9
. In this mode the DSP-10 transmits
a CW pulse for 2 seconds. There is
a delay of 2.6 seconds from the START of the transmitted pulse to allow for
pulse travel, followed by a 2 second receive period.
(The actual pulse travel time will vary from about 2.4 seconds at
perigee to about 2.7 seconds at apogee).
The cycle then repeats (every 5 seconds) for as long as desired, and
the DSP-10 averages the received signal to gain the square root of n increase
in signal-to-noise ratio obtained with n > 1.
An averaged spectrum is displayed in yellow in the standard DSP-10
spectrum display area. With this technique
Bob W7PUA has detected well defined EME echoes using 5 watts of transmit
power and a 4 x 12 element array!
EME Doppler correction is automatically applied by the software.
The software can introduce a random frequency shift with each cycle,
to minimize the effects of any birdies that are present by smearing them
over many bins. A maximum range of
spread of 200 Hz is a good starting point for this parameter.
The software will automatically identify in CW periodically, to
meet FCC requirements. For this mode
the timing requirements are relaxed, since the same station is transmitting
and receiving, but the timing should still be within about 20 seconds for
144 MHz work or 2 seconds for 1296 MHz work so that the Doppler correction
calculations are adequate. Bin width
is set to 2.3, 4.6 or 9.2 Hz by setting the Spectrum Analysis Width (
SpecAnl Width) parameter to 1200, 2400, or 4800 Hz, respectively.
The EME-2 mode will provide an estimate of the returned signal strength,
and is thus an excellent way to initially characterize and then follow the
performance of ones EME system over time.
The second automated mode
is PUA43, so named because Bob W7PUA created it, and because there are 43
defined characters in the PUA43 code:
the letters A-Z, the numerals 0-9, Space, Period, the comma, the forward
slash, the pound sign, the question mark, and the Dollar sign.
The pound sign is defined as message received and the Dollar sign
is used to shift the meaning of the following character.
This mode is the mode generally used for two-way low power level
EME communications, and is the direct antecedent of JT44.
With PUA43, message lengths of 14 or 28 symbols can be selected.
The mode transmits for one minute out of each 2 minute transmit/receive
cycle, and receives for other minute.
Each symbol is sent for 2 seconds, so if a 14 character message length is
selected, the message is repeated during the second half of the minute-long
transmit period, giving an immediate 1.5 dB signal-to-noise advantage over
the 28 character-length mode. At the
end of each transmit minute a 4 second CW ID is inserted.
In this mode each character is represented by one of 43 defined
frequency bins. Within the received spectrum,
every fourth receive bin is used for one of these 43 character tones,
with guard bins adjacent to each tone bin used to allow for spectral broadening
and frequency errors. Noise is estimated
by measuring the level of the second-adjacent bins on either side of each
tone bin. A pseudo-random frequency
spread is again used to reduce the effects of birdies.
The shift for each transmit period is taken from a lookup table
that defines a value of the shift function for every minute of the day.
Doppler corrections can again be automatically applied, and the
pulse transit delay (2.6 seconds is again used) is applied automatically.
The frequency accuracy of the transmit/receive system should be
kept to within 0.5, 1.0, or 2.0 Hz AT THE OPERATING FREQUENCY depending upon
the bin width, which is a function of the Spectrum Analysis Width, as noted
above. The software uses a message
estimation algorithm to estimate the received message based upon the previously
received data. A black-colored character
in a message estimation box means the estimate has a low confidence level
for that character, a beige character indicates a medium level of confidence,
and a white-colored character means a high confidence level has been achieved.
It is possible to adjust the quality level required for achieving
a particular result with this display, by using the Quality Ratio parameter.
With this mode Bob W7PUA and his brother Beb
W7SLB have completed a two-way EME contact on 144 MHz using single
yagis and 150 watts transmitter power at each end.
Ernie W7LHL and Larry W7SZ completed an EME contact on 10 G with
TVRO dishes and 5-15 watts at each end with this mode.
The details of these exploits are at
http://www.proaxis.com/~boblark/wksig1.htm
.
The third DSP-10 automated
mode is LHL-7. This is essentially
an FSK-based Morse code method with much greater tolerance for frequency
errors than PUA43. IT can be used
with either human or automatic decoding.
Dots are sent at 750 Hz tone frequency, dashes at 900 Hz, end of character
at 600 Hz, and times two at 1050 Hz, times three at 1200 Hz, times four
at 1350 Hz, and times five at 1500 Hz.
Thus e would be 750 Hz, 600 Hz.
The numeral 5 would be 750 Hz, 1500 Hz, 600 Hz.
Each tone can be sent for either 2, 4, 10, 20, or 60 seconds.
Automatic Morse ID can be sent periodically.
Automatic Doppler correction can be applied.
Timing requirements are relaxed slightly due to the potentially
longer pulse lengths, but must still be within the range for adequate automatic
Doppler correction. There is substantial
flexibility in the parameter selections available for this mode, and they
are spelled out very nicely in the file Readme20.txt, available on Bob W7PUAs
website (listed above). This is the
only DSP-10 mode that I have not used and tested.
The fourth and currently
the last automatic mode available in the DSP-10 hardware/software package
is the LTI, or Long Term Integration mode.
This mode is able to detect signals in the range of -180 to -190
dBm. Such
signals are on the order of 30-40 dB below audibility.
This mode operates much like EME-2, with alternating transmit and
receive periods, but the transmit and receive cycle lengths are adjustable
variables, and either CW or a continuous tone can be transmitted, with automatic
CW ID possible as well. Both frequency
randomization and automatic Doppler correction for EME can be used if desired.
There is no practical limit on the number of transmit/receive cycles
or signal averages that can be used, as long as adequate frequency stability
is maintained. For very weak signals
the number of signal averages can be extended into the thousands.
There is a noise blanker function that will discard the data from
a given period if the noise in the noise-measurement bins for that period
exceeds the running average of the noise by x dB.
This mode is most useful for determining path performance between
two stations, and for exploring the possibility of a link between two sites
where conditions are expected to be at most marginal.
It is an excellent experimental propagational
tool.
The DSP can, for experimental purposes such as testing
the robustness of the automated techniques, generate transmit signals with
known amounts of Gaussian white noise added to the signal.
Scrl-F6 puts one into the Setup menu for this feature.
Back to top.
V. JT44: Joe Taylor K1JTs DSP Solution [now JT65]
Like its close relative PUA43, Joe Taylors JT44 [now JT65] (a part of the WSJT software package), has been used successfully for EME contacts when the signals were too weak to be heard, when contacts by conventional means would have been impossible. The modes PUA43 and JT44 [now JT65] are very similar. Bob developed PUA43 for use with his superb DSP-10 transceiver, as described above, and Joe Taylor extended this type of mode for use with commercial gear by developing the JT44 mode. With these modes you do not audibly decode the other stations information; the software and computer hardware provide the decoding. If signal conditions are poor, you may not even hear the other station, but just see his signal on a time-averaged waterfall display. The skill with these modes is in setting up the hardware and software to do its job, and getting the radio on frequency. The programs then communicate by sending and receiving signals at precisely determined times and frequencies, and the information received appears on your computer screen.
As was described in the section above on PUA43 and the DSP-10, these modes are designed for very weak signal communication, and use relatively low data rates. They use narrow band filtering to divide the audio spectrum into many bins. These bins are then assigned to different characters. Both programs use fixed message lengths to permit exact timing of messages. Bob Larkin estimates that PUA43 may have up to a 20-25 dB advantage over human message decoding using the Morse code, and Joe Taylor estimates a 14 dB advantage for JT44. Both PUA43 and JT44 use the same character set described above for PUA43. They differ in that JT44 uses one additional tone frequency to provide frequency and time synchronization for the communicating stations. Whereas PUA43 achieves synchronization by means of specially designed hardware (the DSP-10) which allows for more efficient message encoding, this is at the expense of loss of applicability to a wider range of hardware. JT44 has in a very short time (I write this in August, 2002) become quite popular for 144 MHz EME work because of this wide applicability, and its effectiveness. Essentially the trade-off between PUA43 and JT44 is between greatest receive efficiency on the one hand and significantly relaxed frequency and time synchronization requirements on the other.
Each JT44 transmission lasts approximately 25.08 seconds, rather than 60 seconds as in PUA43. Each 25-second JT44 transmit period contains 135 intervals of data. 69 of these intervals contain only the synchronizing tone (1270.5 Hz), and the other 66 contain the encoded data. The synchronizing and data intervals are interleaved in a pseudo-random pattern such that the auto-correlation function of this pattern has a large spike at correct alignment of frequency and time, and very small values elsewhere. This property of the auto-correlation function is why JT44 stations can achieve alignment with each other without the need for special hardware. At the time I write this, JT44 will work with frequency errors of +/- 600 Hz or less, and clock errors of -2 to +4 seconds, according to K1JT. The asymmetric range is appropriate for EME because of the EME roundtrip delay. JT44 message lengths are fixed at 22 characters.
As with PUA43, sub-audible EME QSOs have been completed using JT44. In my first 24 hours of playing with 144 MHz JT44 EME, under terrible conditions where the only stations I could actually hear were W5UN and KB8RQ, I was able to complete QSOs with 5 smaller stations using JT44. My computer clock was controlled via one of the US government atomic clock Internet sites via the program AboutTime (Dimension 4 is another good one). The transceiver used was a Yaesu FT1000MP Mk V, with an SSB Electronics LT2S Mk II transverter. I was using about 800-1000 watts output to my 2 x 2 array.
Figure 10 is a screen shot of WSJT in JT44 mode obtained when I was receiving RU1AA calling CQ with JT44 on 144 MHz EME.
How do JT44 and PUA43 compare in performance? Bob Larkin has done a nice analysis of this which I will summarize here. Basically, when PUA43 is used in 14-character-message mode, it spends more than 3 times as long transmitting each character during each minute of transmission as does JT44. This translates to a 2.7 dB signal-to-noise advantage for PUA43. PUA43 bin widths are 2.3, 4.7, and 9.4 Hz while JT44 has a fixed bin width of 5.4 Hz. The three PUA43 bin widths have respective advantages relative to JT44 of 1.8 dB, 0.3 dB, and -1.2 dB. Thus the largest advantage PUA43 might be expected to have over JT44 would be on the order of 4.5 dB. This represents a power ratio of 2.8, and so it would take (2.8 x 2.8) = 8 times as long to achieve a given signal-to-noise ratio with JT44 compared with the time required with PUA43 when these parameters are used. This advantage for PUA43 is gained at the expense of many fewer stations having the capabilities of doing PUA43, as it requires the DSP-10 hardware. Additionally, JT44 can handle two character repeated messages such as RORORORORO as two rather than 22 character messages, and this would improve the JT44 signal-to-noise ratio by 5.2 dB. JT44 will also integrate the last four characters of a message, so that if these are identical an improvement of 3 dB is obtained. Thus under these circumstances JT-44 could outperform PUA43.
Joe Taylors WSJT website is at http://pulsar.princeton.edu/~joe/K1JT/ . There are other JT44 resources on the web at http://www.qsl.net/wb5apd/JT44-eme.html and http://www.chris.org/cgi-bin/JT44talk and http://www.qsl.net/w8wn/hscw/papers/hot_news.html.
WSJT will soon include a test mode that is very similar to the DSP-10s EME-2 Mode. Back to top.
For further information on DSP techniques for weak signal use refer to the links provided at start.htm .
Autumn, 2000:
Proceedings of Microwave Update 2000: Roger Rehr, W3SZ, A Brief Summary of SM5BSZs and other DSP Programs for Weak Signal Work, September 2000, pp 7-12; Trevose, Pennsylvania.
Elecraft Tech Notes: Roger Rehr, W3SZ, An Overview of Software DSP for Weak Signal Enhancement,
http://www.elecraft.com/TechNotes/w3sz_dsp/w3szdspnew.htm .
January, 2001:
QRP Quarterly: by Roger Rehr, W3SZ, An OverviewDSP Software for Weak Signal Detection, Vol. 42, Number 1: pp 34-36, 2001.
Summer, 2001:
Proceedings of the 26th Eastern VHF/UHF Conference of the Eastern VHF/UHF Society and the North East Weak Signal Group: Roger Rehr, W3SZ, A Brief Discussion of Some DSP Solutions, August 2001, pp 76-113; Enfield, Connecticut.
26th Eastern VHF/UHF Conference of the Eastern VHF/UHF Society and the North East Weak Signal Group: Roger Rehr, W3SZ, A Brief Discussion of Some DSP Solutions, Invited Oral Presentation and accompanying CD, August, 2001; Enfield, Connecticut.
Summer, 2002:
Proceedings of the 10th International Amateur Radio Moon-Bounce Conference: Roger Rehr, W3SZ, A Brief Discussion of Some Software DSP Solutions Ive Tried, August 2002, pp 114-145; Prague, Czech Republic.
10th International Amateur Radio Moon-Bounce Conference: Roger Rehr, W3SZ, A Brief Discussion of Some Software DSP Solutions Ive Tried, Accompanying CD, August 2002; Prague, Czech Republic.
Autumn, 2002:
Proceedings of Joint Conference, 17th Annual Microwave Update 2002 and the 28th Eastern VHF/UHF Conference: Roger Rehr, W3SZ, Software DSP Solutions for Weak Signal Communications, October 2002, pp 124-152; Enfield, Connecticut.
17th Annual Microwave Update 2002: Roger Rehr, W3SZ, Software DSP Solutions for Weak Signal Communications, Invited Oral Presentation, October 2002; Enfield, Connecticut.
DUBUS: Roger Rehr, W3SZ, Using Software DSP Solutions to Enhance Weak Signal Communications: A Users Discussion of Linrad, SM5BSZs Linux PC Radio, Fourth Quarter 2002 Issue DUBUS, pp 42-61. DUBUS-Verlag, Hamburg, Germany. English and German versions.
Second Quarter, 2003:
DUBUS: Roger Rehr, W3SZ, A Users View of the DSP-10: Bob Larkin, W7PUS's Innovative 144 MHz DSP Transceiver", Second Quarter 2003 Issue DUBUS, pp 20-35. DUBUS-Verlag, Hamburg, Germany. English and German versions.
Third Quarter, 2003:
Proceedings of the 29th Eastern VHF/UHF Conference: Roger Rehr, W3SZ, An Overview of Software DSP for Weak Signal Enhancement, August 2003, pp 82-93; Enfield, Connecticut. This is a reprint of the paper from Autumn, 2000, which is available on the Elecraft website.
Back to top.
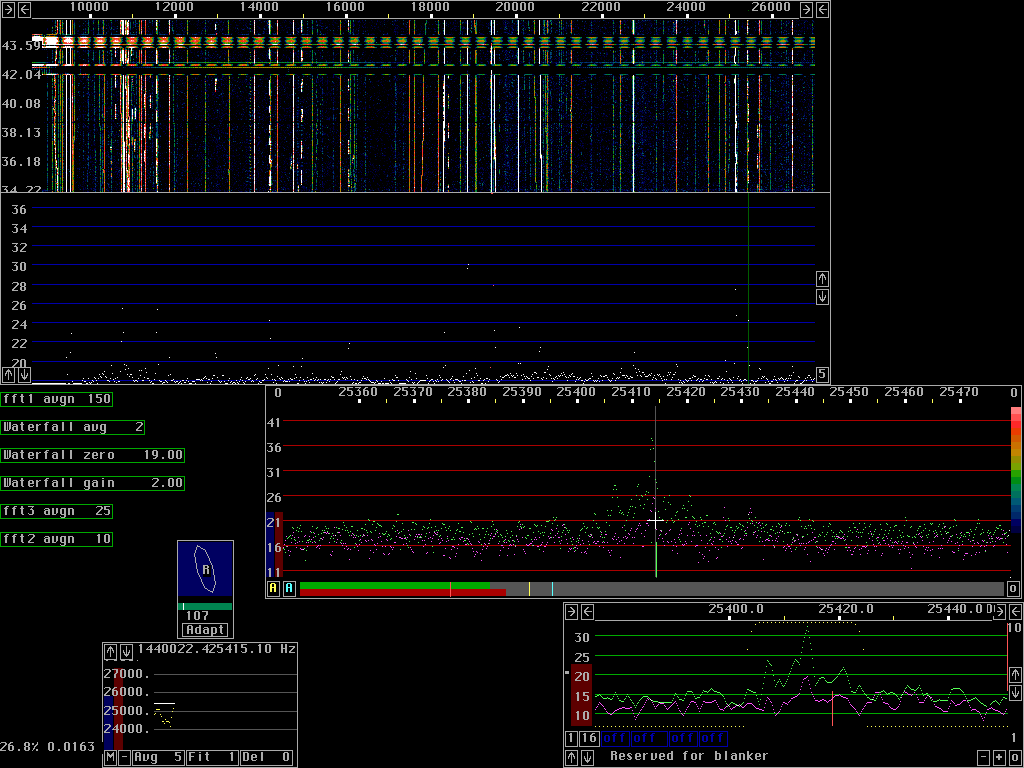
Figure 1.
Linrad screen showing
a 16 kHz portion of the 2 meter band
as received by me during the ARRL 2001 EME Contest.
On the waterfall display at the top of the screen you can see among
the many birdies I have at my location, at least 12 vertical dashed lines;
each one of these is an EME stations signal as received by
Linrad, SM5BSZs software receiver at W3SZ. At 25413 Hz is G0RUZ,
whom I was working when this screen shot was obtained. The broader horizontal
bands across the waterfall represent my signal overloading the receiver when
I transmitted.
Return to text
.
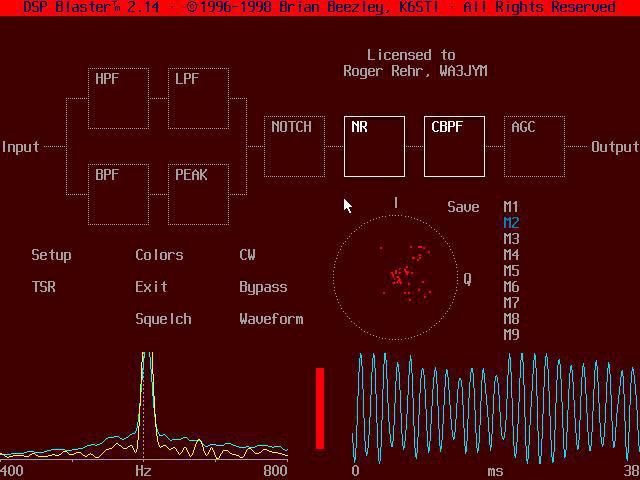
Figure 2.
The screen above didn't do very well in the transition from bmp
to jpg file type, but you can see the essentials of a DSP-Blaster screen
captured as I was listening to F3VS off the moon. Across the top is the
block diagram of the signal path in software. You put the mouse over a block
and click to select it and adjust its parameters. Here I have the LMS Noise
Reduction and the Coherent BandPass Filter activated.
The circular display is of F3VS's signal in binaural mode, the 'pseudo-stereo'
mentioned in the text. The text in the center is to set certain parameters,
activate TSR mode, etc. The designations M1-M9 are to save user-defined
filter combinations for future use. On the bottom left is a spectral display,
with yellow real-time and blue averaged. On the right is a time domain real-time
display. The red vertical bar in the
center is a level indicator, and indicates that F3VS has saturated the system.
Return to text
.
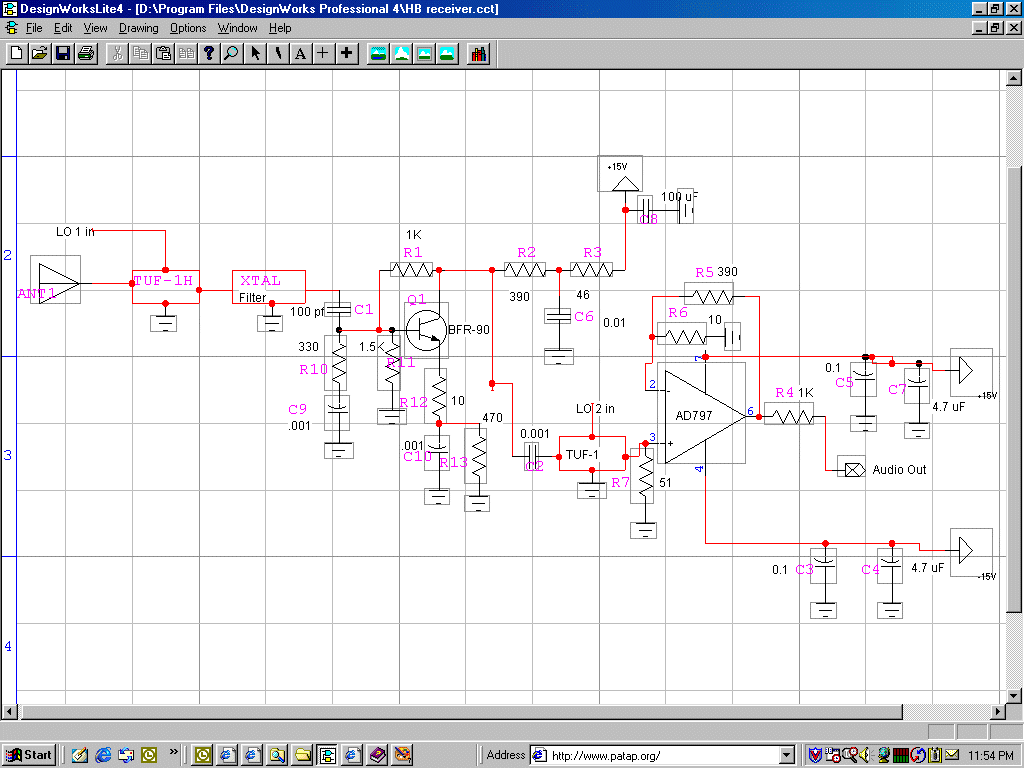
Figure 3.
This is a schematic of the front-end I use with the
Linrad software receiver. It
is a simple configuration, but works well for me.
The combination of this front-end and Linrad
outperforms the conventional receiver combinations I have tried.
Return to text
.
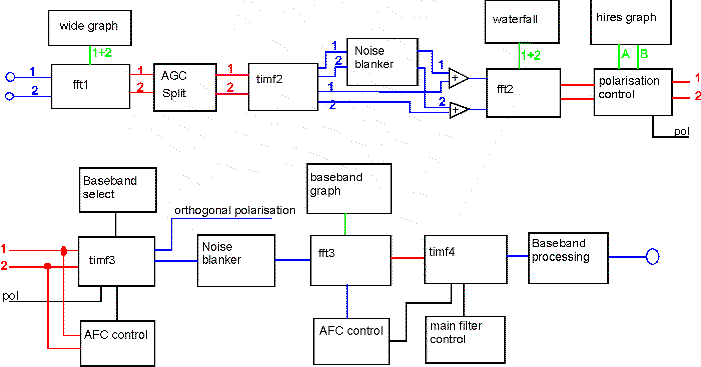
Figure 4. This is Leif SM5BSZs block
diagram of the Linrad Linux PC Receiver.
Blue signal paths are time domain signals and red signal paths are
frequency domain signals. Green signal
paths represent power vs. frequency displays, and black signal paths represent
control pathways.
Return to text
.
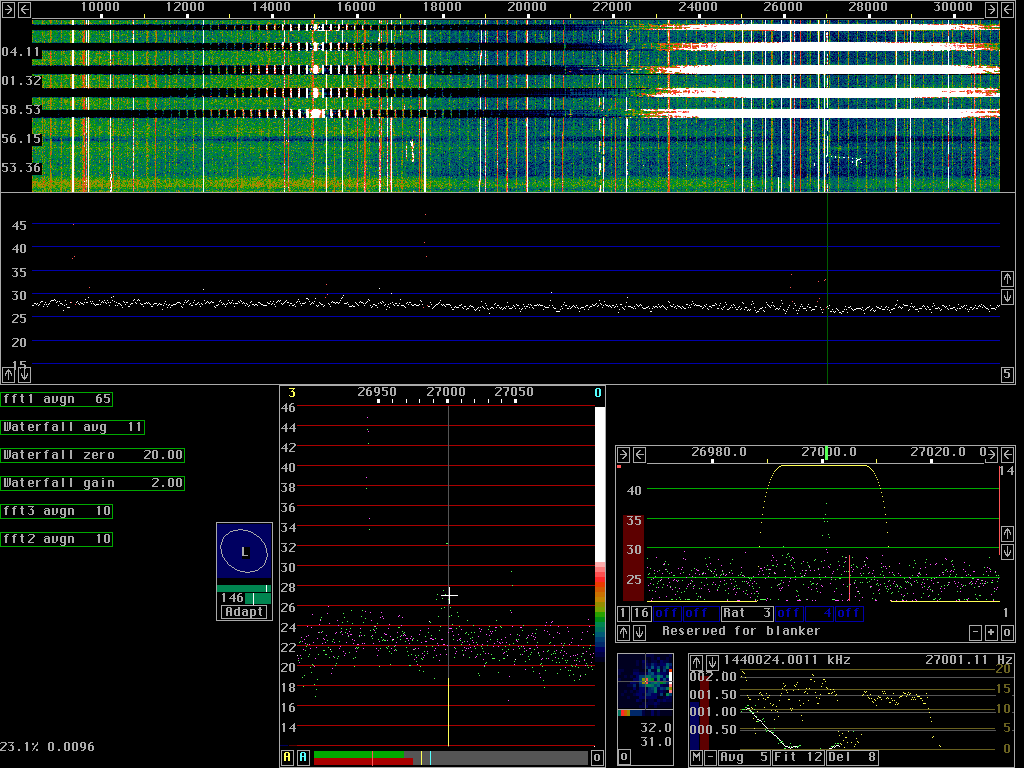
Figure 5. Linrad
screen taken during ARRL EME contest.
KB8RQ is at 27000 Hz. You can see his
signal as a series of vertical dashes beneath the green cursor on the upper
full-width waterfall and main spectrum displays at the top of the screen,
and above the vertical yellow cursor, aligned with the vertical grayish cursor
on the high resolution display in the center of the screen below these displays.
It is also visible centered within the yellow filter outline in
the baseband display, to the right of the high
resolution display bottom of the screen, above the AFC window.
Further details of the display are given in the text.
Return to text
.
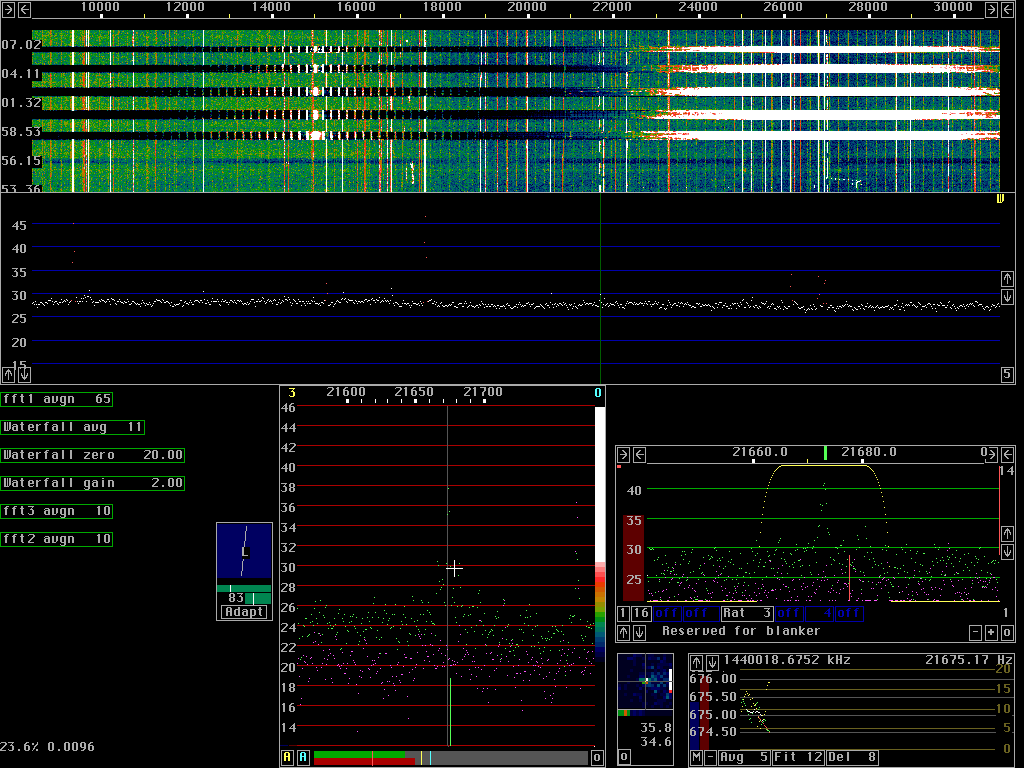
Figure 6.
Linrad screen receiving
Dave W5UNs EME signal at 21672 Hz.
You can see Daves signal beneath the cursor in the waterfall, main
spectrum, high resolution spectrum, and baseband
spectrum displays. In the
baseband spectrum display you can see his keying sidebands within
the yellow filter curve. To the right
of the high resolution display the polarity display shows that
Linrad is automatically controlling the polarization angle of the
received signals and that Daves polarization as received is nearly vertical,
at 83 degrees. Additional details
are given in the text.
Return to text
.
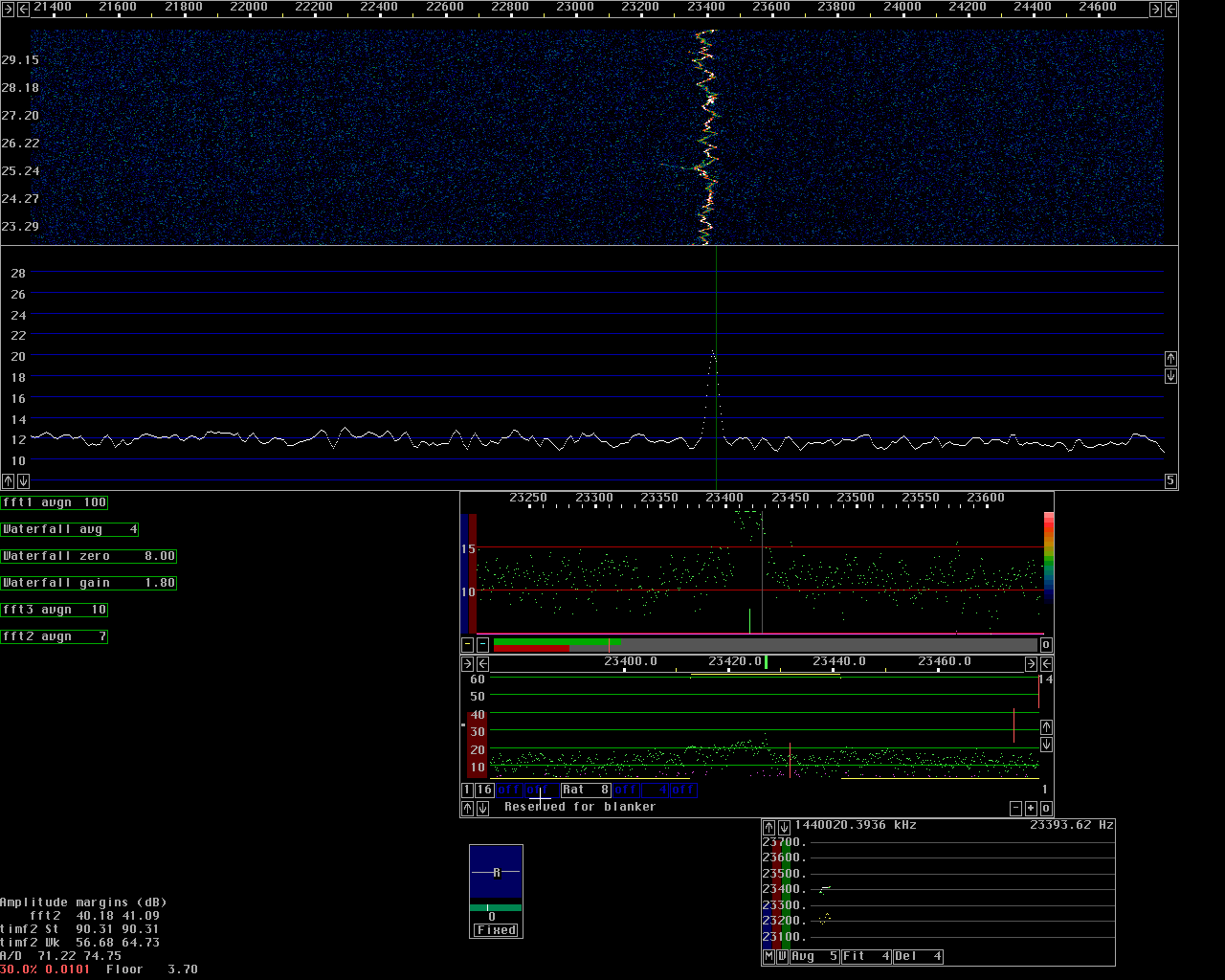
Figure 7
shows a Linrad screen with the homebrew receiver
and Linrad being used as the IF for a 2304 MHz
receiver, monitoring the W3CCX 13cm beacon.
The frequency instability of the beacon as received over this path
is demonstrated nicely with the waterfall and main spectrum displays zoomed
to show just 3 kHz of spectrum. There
is a polarization angle of zero and only a green spectrum on the high resolution
display because there is just one receive channel used on this band (horizontal
polarization).
Return to text
.
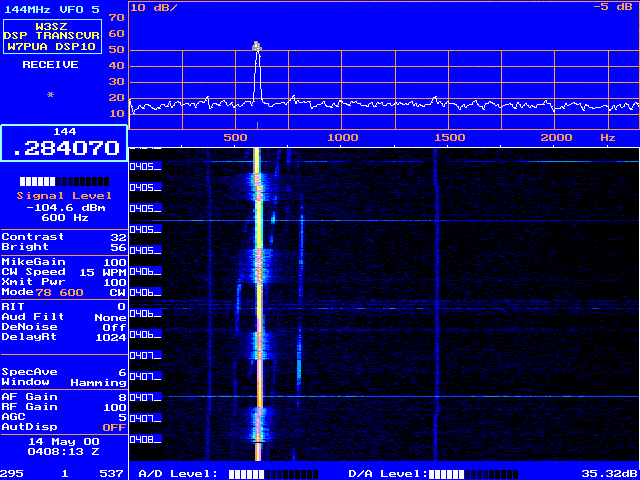
Figure 8.
DSP-10 screen showing the W3CCX 2 meter beacon.
Across the top of the screen is the spectrum display.
Labels on the spectrum include relative signal strength in dB (shown vertically
on the left of the spectrum display), and frequency (shown horizontally along
the bottom of the spectrum). Baseline
level (-5 dB) is shown at the upper right corner of the display.
The W3CCX signal peak is easily seen at 600 Hz.
Below the spectrum display the waterfall shows a tracing of the
beacon signal over time. To the
left of the waterfall is the time axis label.
Below the waterfall is a display showing the signal levels relative
to saturation in the A/D and D/A converters.
At the lower right corner of the display, adjacent to the D/A Level
Meter, is the current average received power level.
To the left of the spectrum display are displays of some DSP-10
operating parameters. We can see that
we are in receive mode, that the VFO is set to 144.284070 MHz, and that
the signal peak has a level of -104.6 dBm
and is centered at 600 Hz. Next are
indicators of the settings for display contrast and brightness,
mic gain, CW speed, transmit power, and mode (CW).
The mode display also tells us that the CW frequency offset is set
to 600 Hz. Then we see that RIT,
Audio Filter, and Denoiser are off, and that
the binaural delay is set at 1024.
Next we see that 6 signals are averaged for each spectrum display and waterfall
line, and that a Hamming windowing function is being used.
The values for audio gain, RF gain, AGC, and automatic display (essentially
AGC for the spectrum display) are shown next.
At the very bottom of the display on the left we see the date and
time and a line containing 3 numbers showing the status of the serial port
and the FFT scale factor.
Return to text
.
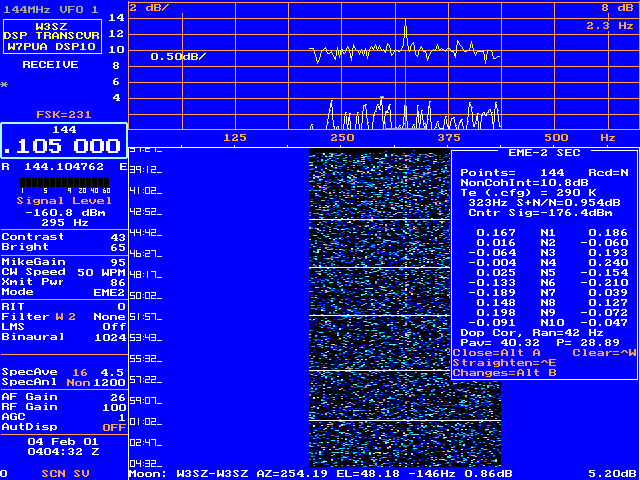
Figure 9.
This is a screen taken with DSP-10 running in mode EME-2.
Transmit power is 150 watts.
The yellow-line spectrum tracing at the top of the screen shows a clearly
defined echo from this low power EME signal.
No signal is apparent in the single-signal spectrum shown in white
immediately below the averaged yellow-line spectrum.
Labels on the frequency spectrum include relative signal strength
in dB, vertically on the left of the spectrum and frequency horizontally
along the bottom of the spectrum.
Baseline level (8dB) and bin width in Hz (2.3) are shown at the upper right
display corner. Below the spectrum
display the waterfall shows intermittently a barely visible signal.
To the left of the waterfall is the time axis label.
To the right is the Alt-A parameter box.
It shows that 144 points have been averaged and that this has improved
signal-to-noise ratio by 10.8 dB.
290K is indicated to be the assumed
noise temperature. The S+N/N ratio
of the center bin is 0.954, and the bin is centered at 323 Hz.
Center bin signal strength is estimated to be -176.4
dBm. Next the S+N/N ratios
of the 10 bins above and below the center frequency bin are shown. We then
see that EME Doppler Correction is turned on, as is random frequency spread,
(43 Hz). To the left of the spectrum
display we that we have set the VFO to 144.105.000 MHz, but that 144.104.762
is the actual received frequency due to the offsets associated with Doppler
Correction and frequency stir. Setup
parameters for the DSP-10 transmitter are then listed.
These are labeled and self-explanatory.
Below the waterfall
the EME Doppler correction parameters are displayed.
Return
to text
.
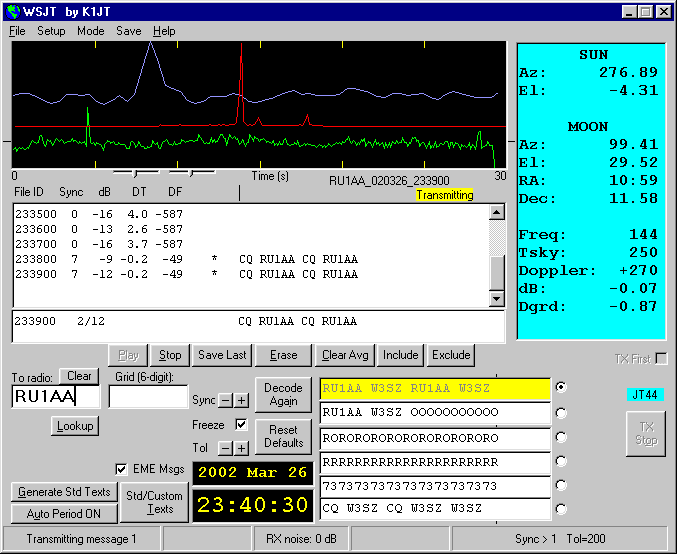
Figure 10.
JT44 screen of RU1AA being received on 144 MHz EME by W3SZ.
You can see that there is immediately perfect copy of RU1AA by JT44.
Unfortunately, RU1AA couldnt copy me.
The display is very well designed. It consists of a waterfall graph
at the upper left of the screen and a Sun/Moon/Sky data box at the upper right.
Below this on the left is the decoded text box, and below this is
the average text box. These boxes
are where you see the perfect copy CQ RU1AA CQ RU1AA.
Below this are various function and parameter boxes.
Download the WSJT Users Guide and Reference Manual from K1JTs
website for further information (
http://pulsar.princeton.edu/%7Ejoe/K1JT/
).
Return to text
.